홈
로그인
회원가입
사이트맵
로봇자동화
파렛타이징
핸들링
빈픽킹
사상/폴리싱
용접
자동라벨부착
산업용로봇
산업용로봇
델타로봇
스칼라로봇
KOWELL로봇
협동로봇
협동로봇
협동로봇100KG
비전검사
비전검사
자료실
자료실
자료실
자료실
자료실
HOME
자료실
로봇자동화
산업용로봇
협동로봇
비전검사
자료실
회사소개
자료실
자료실
보기
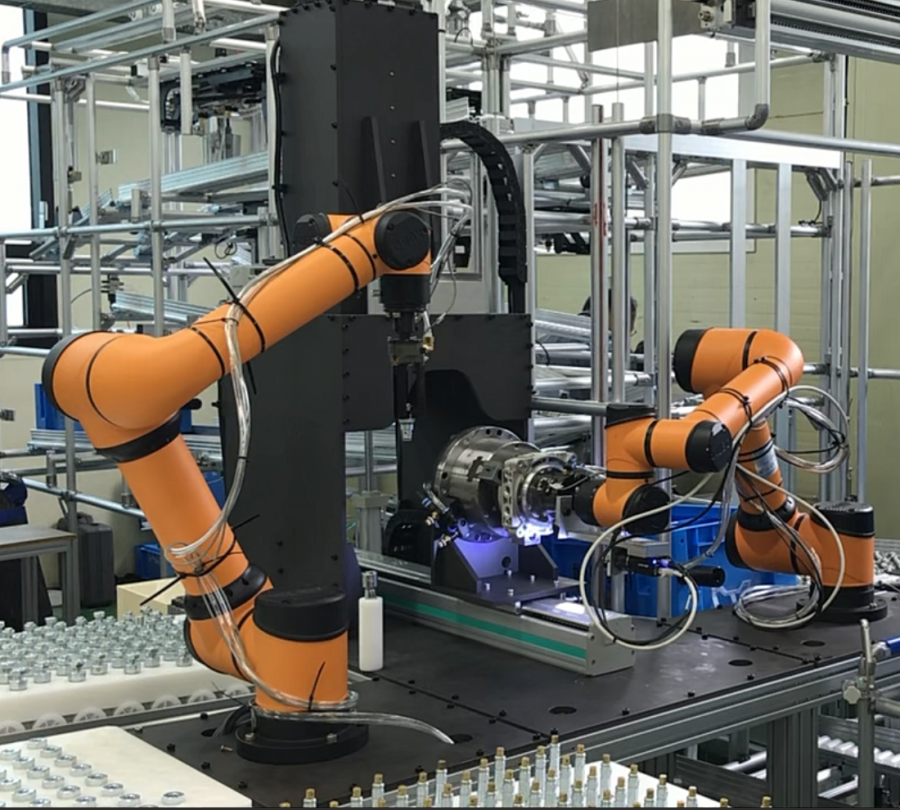
협업로봇 조립작업 (비전장착), CoBot
한 로봇은 BOX내부의 불규칙 부품위치를 찾아 조립작업을 하고,
다른 로봇은 규칙적인 부품판에서 부품을 잡아 조립작업을 합니다.
등록
목록
자료실
번호
제목
등록자
등록일
조회수
38
디파렛타이징(dePalletizing) 로봇 작업
관리자
2026-04-25
107
37
파렛타이징(Palletizing) 로봇작업
관리자
2026-04-25
79
36
오토닉스 인증 안전잠금장치 SFDL 배선설명,
관리자
2026-04-16
96
35
현대로봇, E1457 외부정지 입력 중이어서 기동실패 설..
관리자
2026-03-26
156
34
현대로봇 Hi6, 사용자 좌표계등록, 사용방법
관리자
2026-01-06
376
33
Phoenix Delta robot 모델명
관리자
2025-11-15
362
32
델타로봇(Delta Robot), 혹은 Parallel Robot(병렬로봇)
관리자
2025-11-08
444
31
현대로봇 Hi6, HRPLC 의 주소설명
관리자
2025-09-09
904
30
현대로봇 hi6의 리모트 IO 설정방법
관리자
2025-09-08
865
29
AMR, AGV 에 관련하여,
관리자
2025-05-02
669
1
2
3
4
이용약관
개인정보처리방침
이메일수집거부
회사소개
회사명: 베니로보테크(주) l 사업자등록번호: 651-87-01093 ㅣ 업태 : 제조업 l 대표: 강용주
경기 시흥시 소망공원로 323 (보성스퀘어원지식산업센터) 713호 l TEL : 010-2886-3635
Email: benirobots@gmail.com | FAX : 041-563-0354 l 개인정보관리책임자 : 강용주
Copyright (c) 2018 All rights reserved
상담문의 010-2886-3635
평일 09:00~18:00